1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
|
output_image_pixel_spacing = [1.366, 1.366, 1]
output_image_size = [501, 501,1] #[501, 501, 1]
InputImageType = type(volume_lung)
FilterType = itk.ResampleImageFilter[InputImageType, InputImageType]
filter = FilterType.New()
filter.SetInput(volume_lung)
filter.SetDefaultPixelValue(0)
filter.SetSize(output_image_size)
filter.SetOutputSpacing(output_image_pixel_spacing)
TransformType = itk.CenteredEuler3DTransform[itk.D]
transform = TransformType.New()
transform.SetComputeZYX(True)
InterpolatorType = itk.RayCastInterpolateImageFunction[InputImageType, itk.D]
interpolator = InterpolatorType.New()
viewer = None
def DigitallyReconstructedRadiograph(
ray_source_distance=100,
camera_tx=0.,
camera_ty=0.,
camera_tz=0.,
rotation_x=0.,
rotation_y=0.,
rotation_z=0.,
projection_normal_p_x=0.,
projection_normal_p_y=0.,
rotation_center_rt_volume_center_x=0.,
rotation_center_rt_volume_center_y=0.,
rotation_center_rt_volume_center_z=0.,
threshold=0.,
):
"""
Parameters description:
ray_source_distance = 400 # <-sid float> Distance of ray source (focal point) focal point 400mm
camera_translation_parameter = [0., 0., 0.] # <-t float float float> Translation parameter of the camera
rotation_around_xyz = [0., 0., 0.] # <-rx float> Rotation around x,y,z axis in degrees
projection_normal_position = [0, 0] # <-normal float float> The 2D projection normal position [default: 0x0mm]
rotation_center_relative_to_volume_center = [0, 0, 0] # <-cor float float float> The centre of rotation relative to centre of volume
threshold = 10 # <-threshold float> Threshold [default: 0]
"""
dgree_to_radius_coef = 1./180.*math.pi
camera_translation_parameter = [camera_tx, camera_ty, camera_tz]
rotation_around_xyz = [rotation_x*dgree_to_radius_coef, rotation_y*dgree_to_radius_coef, rotation_z*dgree_to_radius_coef]
projection_normal_position = [projection_normal_p_x, projection_normal_p_y]
rotation_center_relative_to_volume_center = [
rotation_center_rt_volume_center_x,
rotation_center_rt_volume_center_y,
rotation_center_rt_volume_center_z
]
imageOrigin = volume_lung.GetOrigin()
imageSpacing = volume_lung.GetSpacing()
imageRegion = volume_lung.GetBufferedRegion()
imageSize = imageRegion.GetSize()
imageCenter = [imageOrigin[i] + imageSpacing[i]*imageSize[i]/2.0 for i in range(3)]
transform.SetTranslation(camera_translation_parameter)
transform.SetRotation(rotation_around_xyz[0], rotation_around_xyz[1], rotation_around_xyz[2])
center = [c + imageCenter[i] for i, c in enumerate(rotation_center_relative_to_volume_center)]
transform.SetCenter(center)
interpolator.SetTransform(transform)
interpolator.SetThreshold(threshold)
focalPoint = [imageCenter[0], imageCenter[1], imageCenter[2] - ray_source_distance/2.0]
interpolator.SetFocalPoint(focalPoint)
filter.SetInterpolator(interpolator)
filter.SetTransform(transform)
origin = [
imageCenter[0] + projection_normal_position[0] - output_image_pixel_spacing[0]*(output_image_size[0] - 1)/2.,
imageCenter[1] + projection_normal_position[1] - output_image_pixel_spacing[1]*(output_image_size[1] - 1)/2.,
imageCenter[2] + imageSpacing[2]*imageSize[2]
]
filter.SetOutputOrigin(origin)
filter.Update()
global viewer
if viewer is None:
viewer = view(filter.GetOutput(), mode='z')
else:
print("Update viewer image")
viewer.image = filter.GetOutput()
# print informations
print("Volume image informations:")
print("\tvolume image origin : ", imageOrigin)
print("\tvolume image size : ", imageSize)
print("\tvolume image spacing: ", imageSpacing)
print("\tvolume image center : ", imageCenter)
print("Transform informations:")
print("\ttranslation : ", camera_translation_parameter)
print("\trotation : ", rotation_around_xyz)
print("\tcenter : ", center)
print("Interpolator informations: ")
print("\tthreshold : ", threshold)
print("\tfocalPoint : ", focalPoint)
print("Filter informations:")
print("\toutput origin : ", origin)
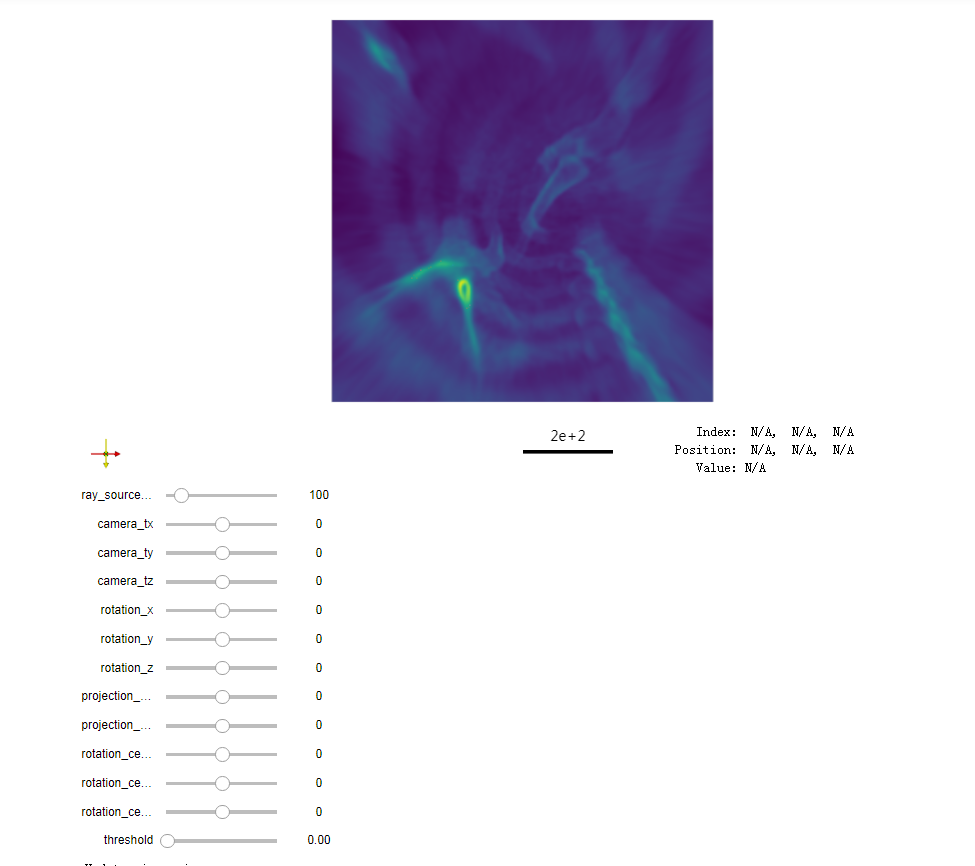
DigitallyReconstructedRadiograph()
slider = interactive(
DigitallyReconstructedRadiograph,
ray_source_distance=(0, 800, 50),
camera_tx=(-400, 400,10),
camera_ty=(-400, 400,10),
camera_tz=(-400, 400,10),
rotation_x=(-45,45,1),
rotation_y=(-45,45,1),
rotation_z=(-45,45,1),
projection_normal_p_x=(-100,100,1),
projection_normal_p_y=(-100,100,1),
rotation_center_rt_volume_center_x=(-100,100,1),
rotation_center_rt_volume_center_y=(-100,100,1),
rotation_center_rt_volume_center_z=(-100,100,1),
)
widgets.VBox([viewer, slider])
|